


Пассивные полосовые фильтрыЕго можно изготовить, соединив фильтр нижних частот с фильтром верхних частот.
Пассивный полосовой фильтр можно использовать для выделения или фильтрации определенных частот, лежащих в пределах определенной полосы или диапазона частот. Частоту среза, или ƒc, в простом RC-пассивном фильтре можно точно контролировать с помощью всего лишь одного резистора, соединенного последовательно с неполяризованным конденсатором, и в зависимости от способа их подключения, как мы видели, получается либо фильтр нижних частот, либо фильтр верхних частот.
Одно из простых применений таких пассивных фильтров — в аудиоусилителях или схемах, например, в кроссоверных фильтрах громкоговорителей или регуляторах тембра предусилителя. Иногда необходимо пропускать только определённый диапазон частот, который не начинается с 0 Гц (постоянный ток) или не заканчивается на какой-либо верхней высокочастотной точке, а находится в определённом диапазоне частот, узком или широком.
Соединив каскадом схему фильтра нижних частот с схемой фильтра верхних частот, мы можем получить еще один тип пассивного RC-фильтра, который пропускает выбранный диапазон частот, который может быть узким или широким, ослабляя при этом все частоты за пределами этого диапазона. Этот новый тип пассивного фильтра создает частотно-избирательный фильтр, обычно называемый полосовым фильтром или BPF.
В отличие от фильтра нижних частот, который пропускает только сигналы низкого частотного диапазона, или фильтра верхних частот, который пропускает сигналы более высокого частотного диапазона, полосовой фильтр пропускает сигналы в определенном «диапазоне» или «расширении» частот без искажения входного сигнала и внесения дополнительного шума. Этот диапазон частот может иметь любую ширину и обычно называется полосой пропускания фильтра.
Полоса пропускания обычно определяется как диапазон частот, существующий между двумя заданными точками среза частоты (ƒc), которые на 3 дБ ниже максимального центрального или резонансного пика, при этом ослабляя или затухая другие частоты за пределами этих двух точек.
Для широко разнесенных частот мы можем просто определить термин «полоса пропускания», BW, как разницу между нижней частотой среза (ƒcLOWER) и верхней частотой среза (ƒcHIGHER). Другими словами, BW = ƒH – ƒL. Очевидно, что для корректной работы полосового фильтра частота среза фильтра нижних частот должна быть выше, чем частота среза фильтра верхних частот.
«Идеальный» полосовой фильтр также может использоваться для выделения или фильтрации определенных частот, лежащих в определенном диапазоне частот, например, для подавления шума. Полосовые фильтры обычно известны как фильтры второго порядка (двухполюсные), потому что в их схемотехнике присутствуют «два» реактивных компонента — конденсаторы. Один конденсатор находится в цепи нижних частот, а другой — в цепи верхних частот.
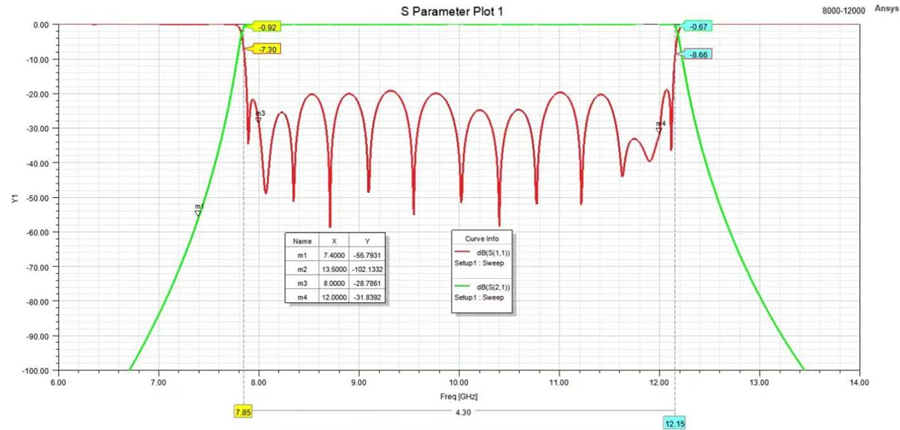
Приведенная выше диаграмма Боде или частотная характеристика показывает особенности полосового фильтра. Здесь сигнал ослабляется на низких частотах, а выходное напряжение увеличивается с наклоном +20 дБ/декада (6 дБ/октава) до тех пор, пока частота не достигнет точки «нижней среза» ƒL. На этой частоте выходное напряжение снова составляет 1/√2 = 70,7% от значения входного сигнала или -3 дБ (20*log(VOUT/VIN)) от входного.
Выходной сигнал продолжает воспроизводиться с максимальным усилением до достижения точки «верхней среза» ƒH, где выходной сигнал уменьшается со скоростью -20 дБ/декада (6 дБ/октава), ослабляя любые высокочастотные сигналы. Точка максимального усиления выходного сигнала обычно является геометрическим средним двух значений -3 дБ между нижней и верхней точками среза и называется значением «центральной частоты» или «резонансного пика» ƒr. Это геометрическое среднее значение рассчитывается как ƒr² = ƒ(ВЕРХНЯЯ) x ƒ(НИЖНЯЯ).
Aполосовой фильтрЕсли такой фильтр считается фильтром второго порядка (двухполюсным), поскольку в его схемной структуре присутствуют «два» реактивных компонента, то фазовый угол будет вдвое больше, чем у ранее рассмотренных фильтров первого порядка, т.е. 180°. Фазовый угол выходного сигнала опережает фазовый угол входного на +90° до центральной или резонансной частоты, то есть до точки, где он становится «нулевым» (0°) или «синфазным», а затем отстает от входного на -90° по мере увеличения выходной частоты.
Верхнюю и нижнюю частоты среза полосового фильтра можно найти, используя ту же формулу, что и для фильтров нижних и верхних частот. Например:

В стандартную комплектацию устройств входят разъемы SMA или N типа «мама», либо разъемы 2,92 мм, 2,40 мм и 1,85 мм для высокочастотных компонентов.
Мы также можем настроить полосовой фильтр в соответствии с вашими требованиями. Вы можете перейти на страницу настройки и указать необходимые параметры.
Дата публикации: 06.09.2022


